

Un querido colega comparte hoy el presente artículo, escrito por Ingrid Fadelli, publicado el 3 de febrero de 2023 en Tech Xplore en el área de Robotics y traducido por nosotros para este espacio. Veamos de qué se trata…
Los avances tecnológicos han abierto interesantes posibilidades para la exploración espacial, lo que podría conducir a nuevos descubrimientos sobre los cuerpos celestes de nuestra galaxia. Los robots han demostrado ser herramientas particularmente prometedoras para explorar otros planetas, particularmente Marte, un planeta terrestre en el sistema solar que se sabe que alberga algunos elementos similares a los que se encuentran en la Tierra.
La exploración de Marte y su superficie es una búsqueda fascinante, ya que podría revelar signos de vida extraterrestre pasada o presente. Además de revelar potencialmente formas de vida microbiana antigua. Estas exploraciones podrían conducir al descubrimiento de recursos que existen fuera de la Tierra, lo que podría allanar el camino para futuras misiones humanas a Marte.
Investigadores de la Universidad de Aeronáutica y Astronáutica de Nanjing han desarrollado recientemente un nuevo robot cuadrúpedo inspirado en lagartijas que podría ayudar en la exploración de la superficie del planeta rojo. Su robot, presentado en la revista Biomimetics de MDPI, tiene una estructura de cuerpo flexible que puede replicar los movimientos y el estilo de locomoción de una lagartija del desierto.
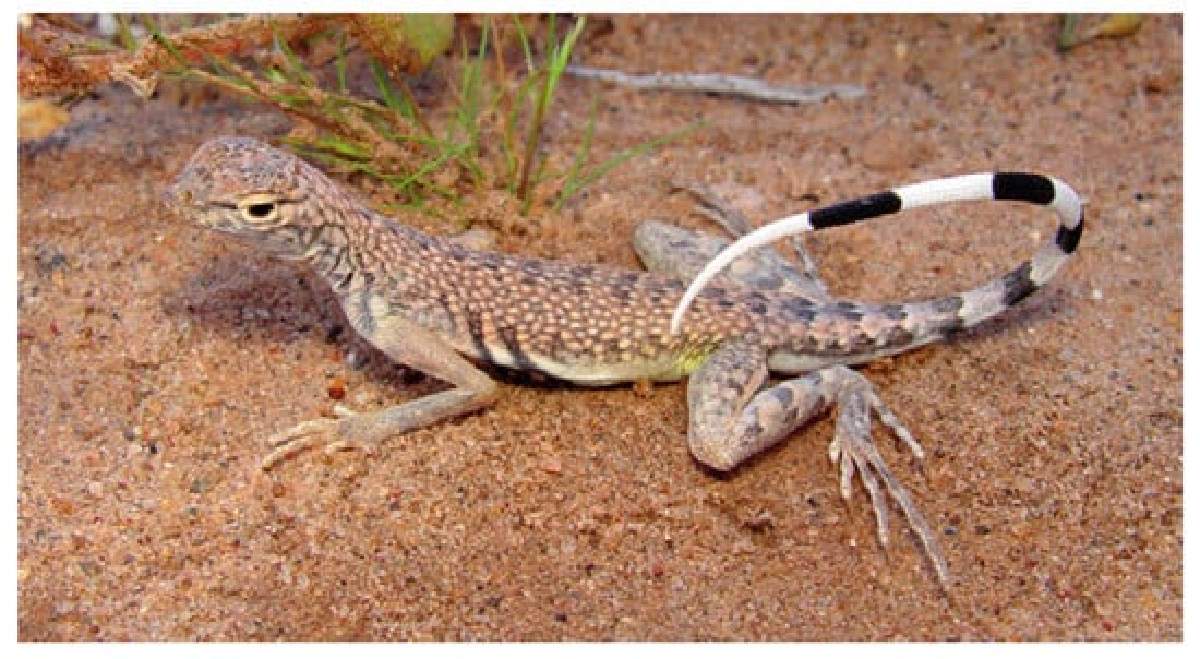
"Para ayudar a las ambiciosas misiones no tripuladas a Marte, se han desarrollado tipos específicos de rovers planetarios para realizar tareas en la superficie de Marte", escribieron en su artículo Guangming Chen, Long Qiao, Zhenwen Zhou, Lutz Richter y Aihong Ji. "Debido al hecho de que la superficie está compuesta de suelos granulares y rocas de varios tamaños, los rovers actuales pueden tener dificultades para moverse sobre suelos blandos y escalar rocas. Para superar tales dificultades, esta investigación desarrolla un robot cuadrúpedo rastrero inspirado en la locomoción característica del lagarto del desierto".
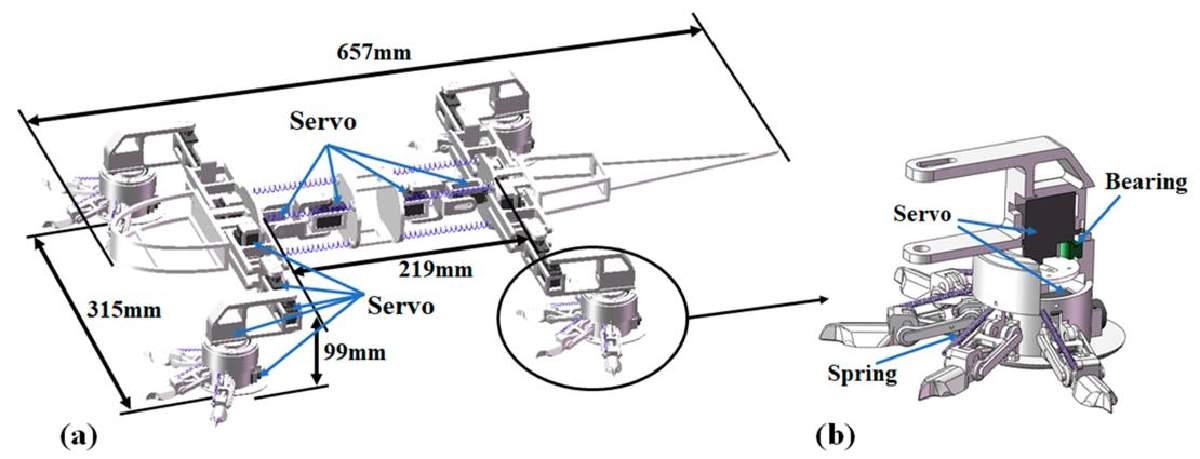
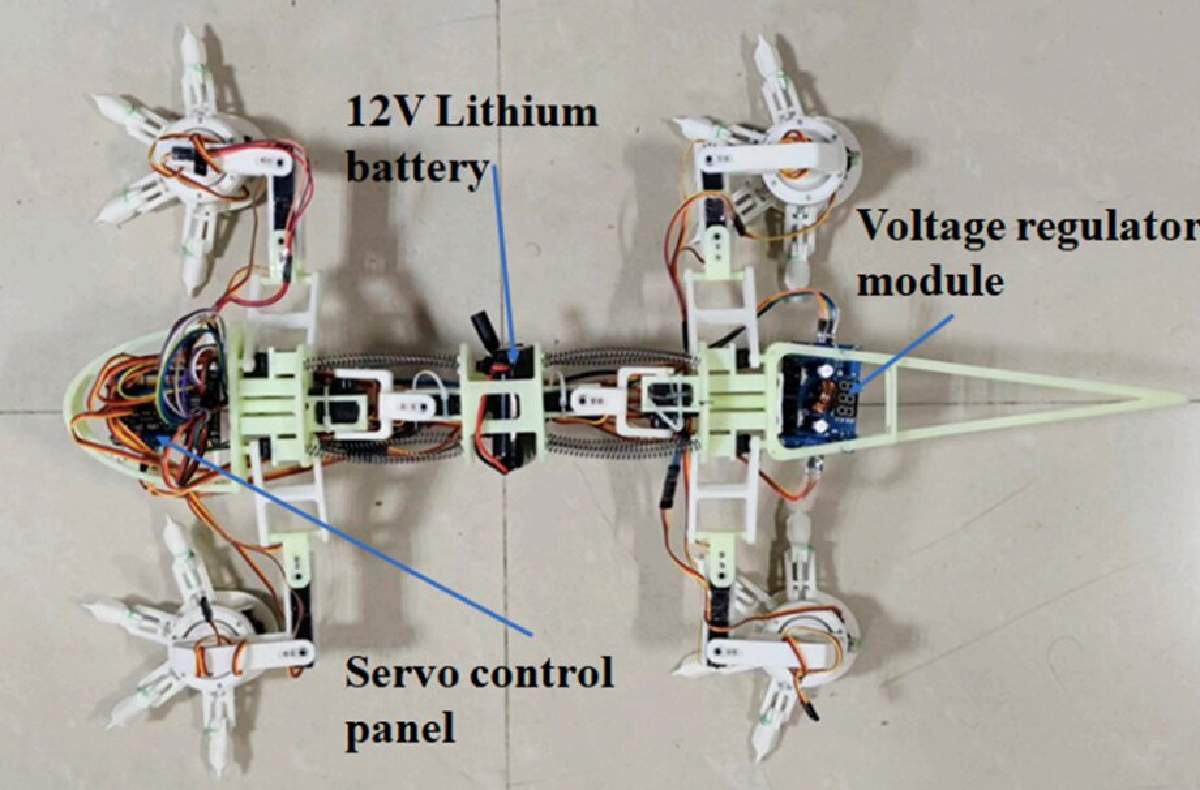
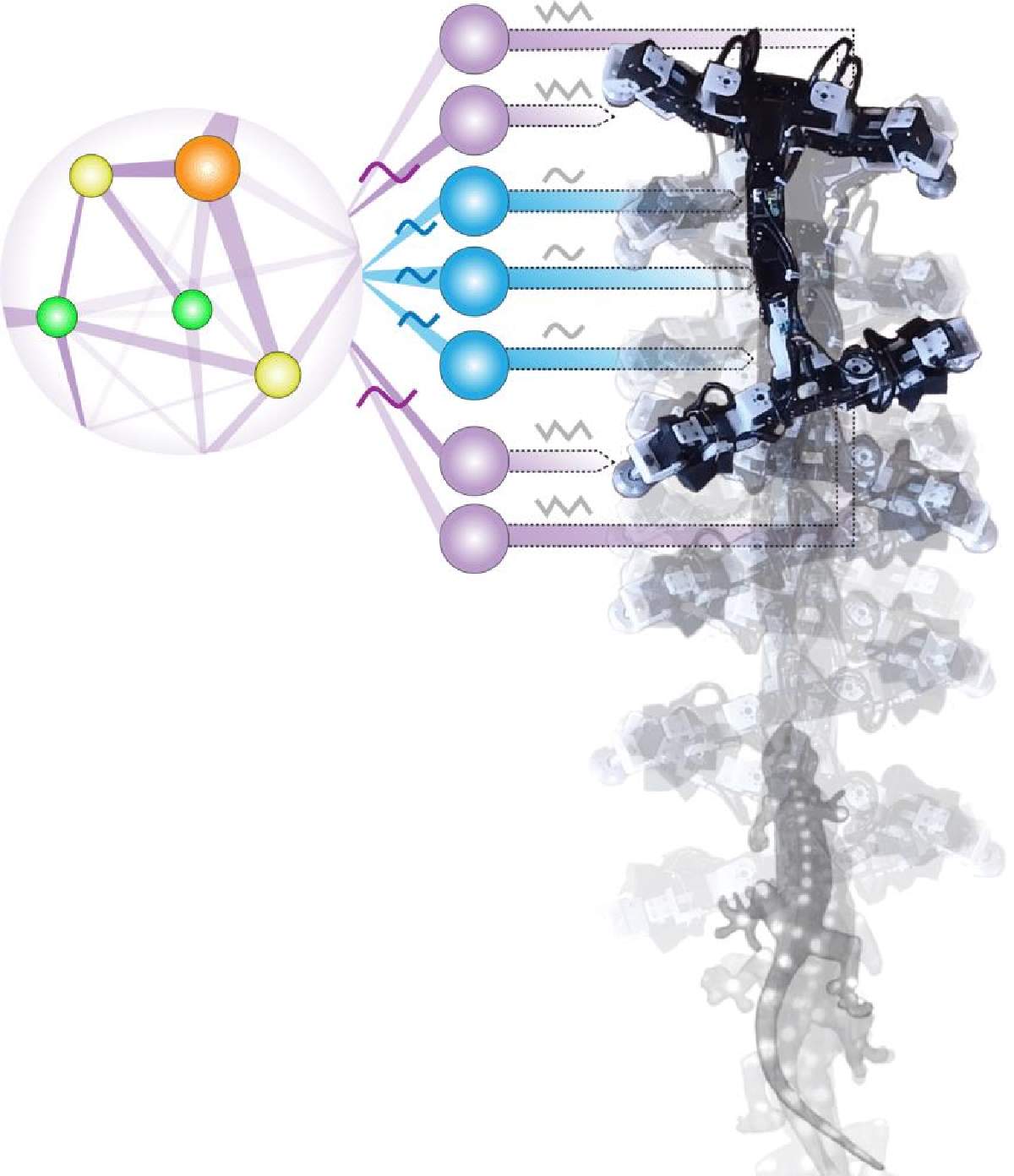
El robot biomimético creado por Chen y sus colegas se compone de una estructura flexible similar a una columna vertebral y cuatro patas. Para replicar el movimiento de "arrastre" típico de los lagartos, cada pata cuenta con dos bisagras y un engranaje que provoca un movimiento de balanceo.
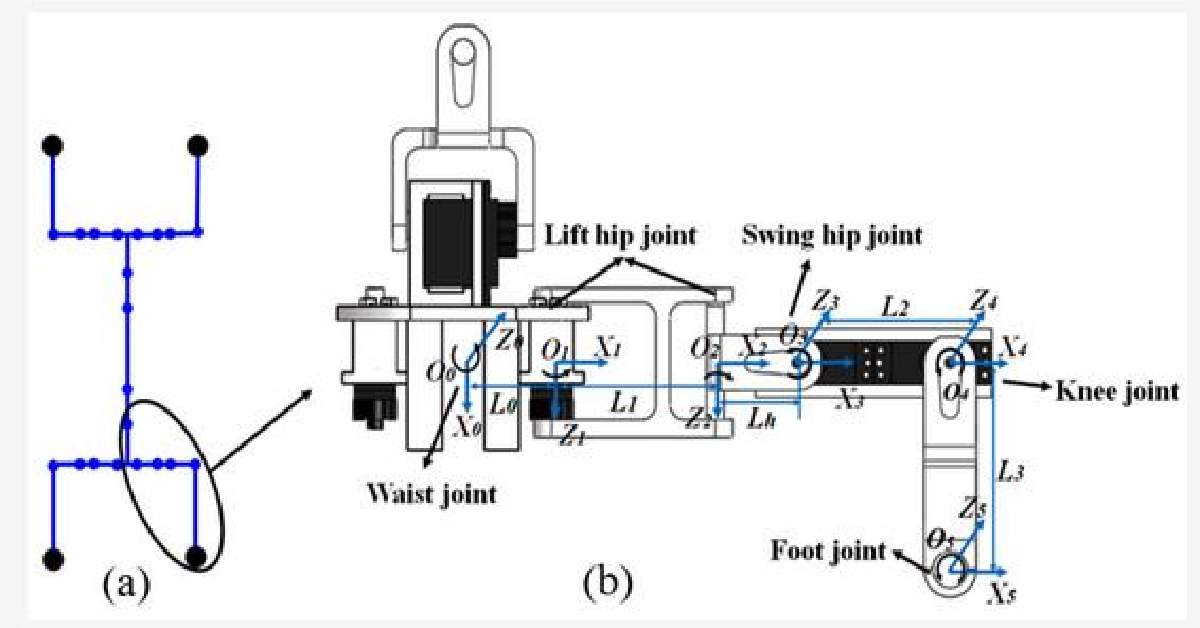
Cada una de las articulaciones de la cadera que conectan la estructura de la columna con las piernas del robot está formada por dos servos y un mecanismo de cuatro articulaciones que permite que el robot se eleve sin perder el equilibrio. Los "pies" del robot tienen cuatro "dedos" flexibles, que consisten en dos bisagras y una garra.
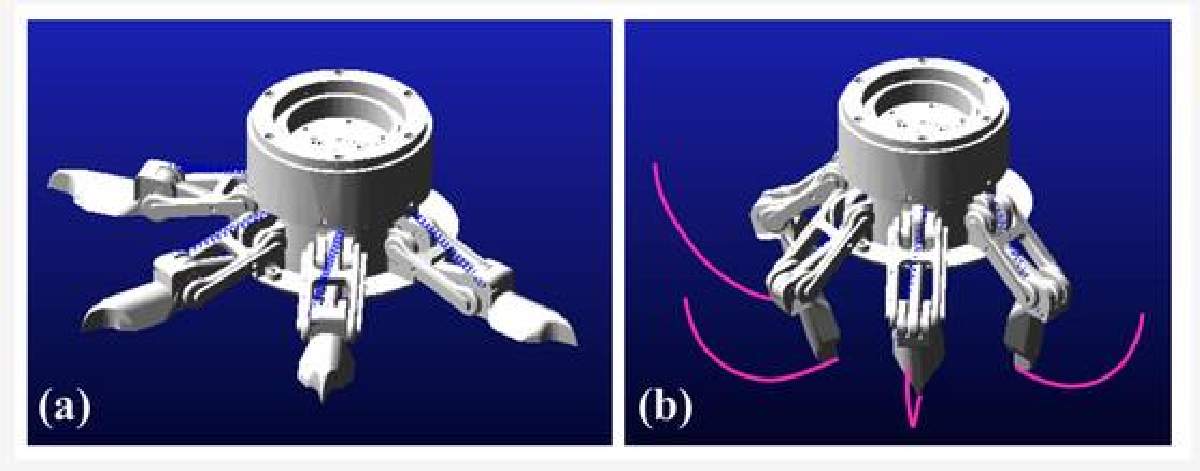
"La estructura de las patas utiliza un mecanismo de cuatro enlaces, lo que garantiza un movimiento de elevación constante", explicaron los investigadores en su artículo. "El pie consiste en un tobillo activo y una almohadilla redonda con cuatro dedos flexibles que son efectivos para agarrar suelos y rocas".
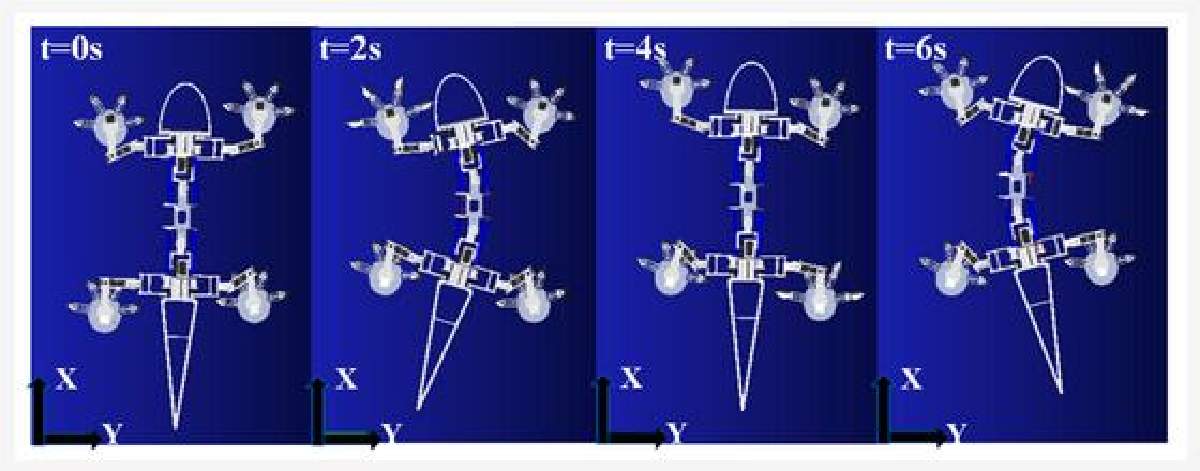
Para replicar los movimientos de los lagartos, los investigadores crearon una serie de modelos cinemáticos para cada uno de los componentes de su robot. Luego usaron estos modelos y cálculos numéricos para planificar los movimientos del robot.
"Para determinar los movimientos del robot, se establecen modelos cinemáticos relacionados con el pie, la pierna y la columna", escribieron Chen y sus colegas en su artículo. "Además, los movimientos coordinados entre la columna vertebral del tronco y la pierna se verifican numéricamente".
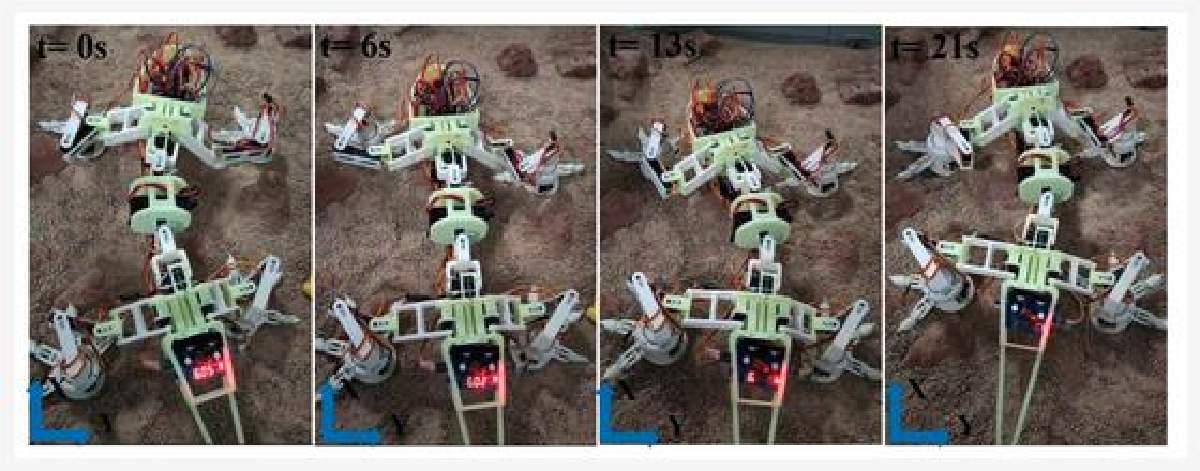
Los investigadores inicialmente evaluaron su robot en una serie de simulaciones para determinar si podía replicar efectivamente los movimientos de los lagartos. Sus resultados fueron muy prometedores, ya que descubrieron que su robot podía realizar los movimientos y el estilo de caminar deseados.
Chen y sus colegas ya crearon un prototipo de su robot utilizando materiales de resina impresos en 3D, un panel de servocontrol, una batería de litio y otros componentes electrónicos. Luego utilizaron un banco de pruebas de simulación para evaluar los movimientos de su prototipo de robot en superficies rocosas que se asemejan al terreno de Marte.
Encontraron que el robot podía moverse efectivamente en ambientes rocosos, destacando su potencial para futuras misiones en el planeta rojo. Sin embargo, antes de que pueda implementarse y probarse fuera del laboratorio, el equipo deberá desarrollarlo aún más, por ejemplo, agregando una estructura de sellado protector que lo protegería del suelo o el polvo en el aire y construyendo su cuerpo con materiales más resistentes.
Chen y sus colegas ahora están trabajando en modelos de aprendizaje automático que permitirían que su robot adapte sus movimientos a diferentes terrenos. Además, planean introducir un sistema que proporcione alimentación continua al robot.
Fuente: https://techxplore.com/news/2023-02-lizard-inspired-robot-explore-surface-mars.html

