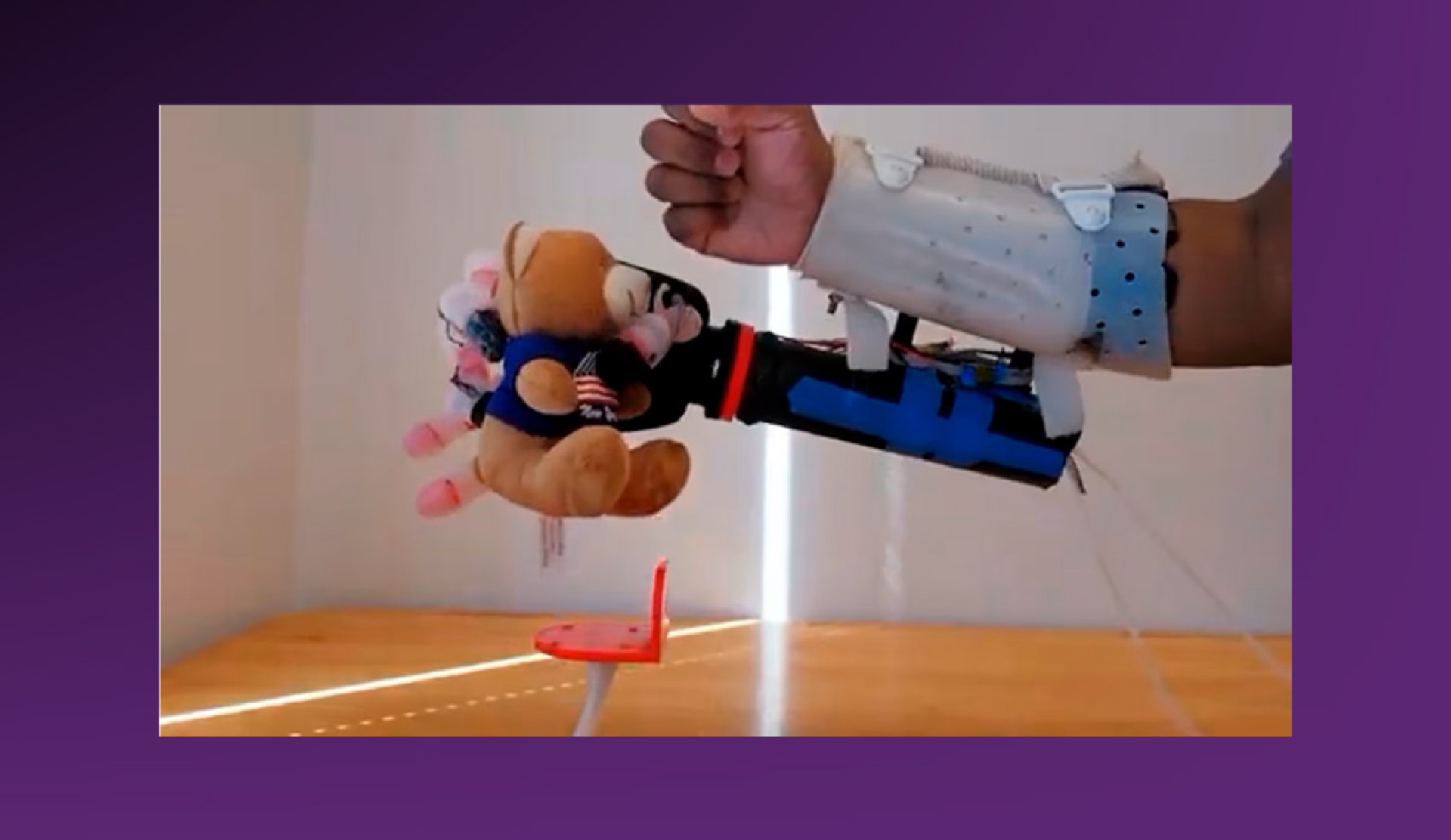
Ingenieros de la Universidad Johns Hopkins han logrado crear una mano robótica híbrida avanzada que combina estructuras rígidas y blandas, ofreciendo control preciso y sensación táctil realista. La prótesis, diseñada para adaptarse a diferentes objetos y texturas, es capaz de ajustar su agarre sin dañar objetos delicados, como vidrio o tela, representando un gran avance en neuroingeniería y robótica médica.
El dispositivo utiliza una estructura interna impresa en 3D con polímeros similares al caucho, lo que permite que la mano se ajuste a las formas y texturas de los objetos. Además, incorpora tres capas de sensores táctiles inspirados en la piel humana, capaces de detectar variaciones en presión, temperatura y deslizamiento.
El control de la prótesis se realiza mediante señales musculares enviadas desde el antebrazo, lo que permite movimientos naturales e intuitivos. A través de inteligencia artificial y aprendizaje automático, la mano procesa información sensorial, ajustando su presión para evitar que los objetos resbalen.
En pruebas de laboratorio, la mano logró manipular diversos objetos con una precisión del 99.69%, superando otras alternativas disponibles. Uno de los experimentos más destacados consistió en levantar un vaso de plástico lleno de agua sin deformarlo, demostrando la capacidad de la prótesis para ajustar su agarre de forma precisa.
Este avance no solo tiene aplicaciones médicas para personas con pérdida de extremidades, sino también en la robótica industrial, donde se requiere manipular objetos delicados sin dañarlos. En el futuro, se planean mejoras que incluyan mayor fuerza de agarre, sensores adicionales y materiales más resistentes.