


¿Qué hay de nuevo en los avances para perfeccionar los vehículos autónomos y permitir su libre circulación? Ekaterina Komendantskaya, Luca Arnaboldi y Matthew Daggitt hacen una breve revisión al estado de estos avances en un artículo publicado el pasado 7 de abril de 2021 en The Conversation, el cual traducimos aquí para la presente columna. Revisémosle…
Los vehículos robóticos se han utilizado en entornos peligrosos durante décadas, desde el desmantelamiento de la planta de energía nuclear de Fukushima o la inspección de la infraestructura de energía submarina en el Mar del Norte. Más recientemente, los vehículos autónomos, desde barcos hasta carros de entrega de comestibles, han realizado la transición suave de los centros de investigación al mundo real con muy pocos contratiempos.

Sin embargo, la llegada prometida de los vehículos autónomos no ha avanzado más allá de la etapa de prueba. Y en una prueba de manejo de un automóvil autónomo de Uber en 2018, el vehículo mató a un peatón. Aunque estos accidentes ocurren todos los días cuando los humanos están detrás del volante, el público exige que los autos sin conductor cumplan con estándares de seguridad mucho más altos, interpretando los accidentes únicos como una prueba de que estos vehículos son demasiado inseguros para permitirles el tránsito irrestricto en las vías públicas.
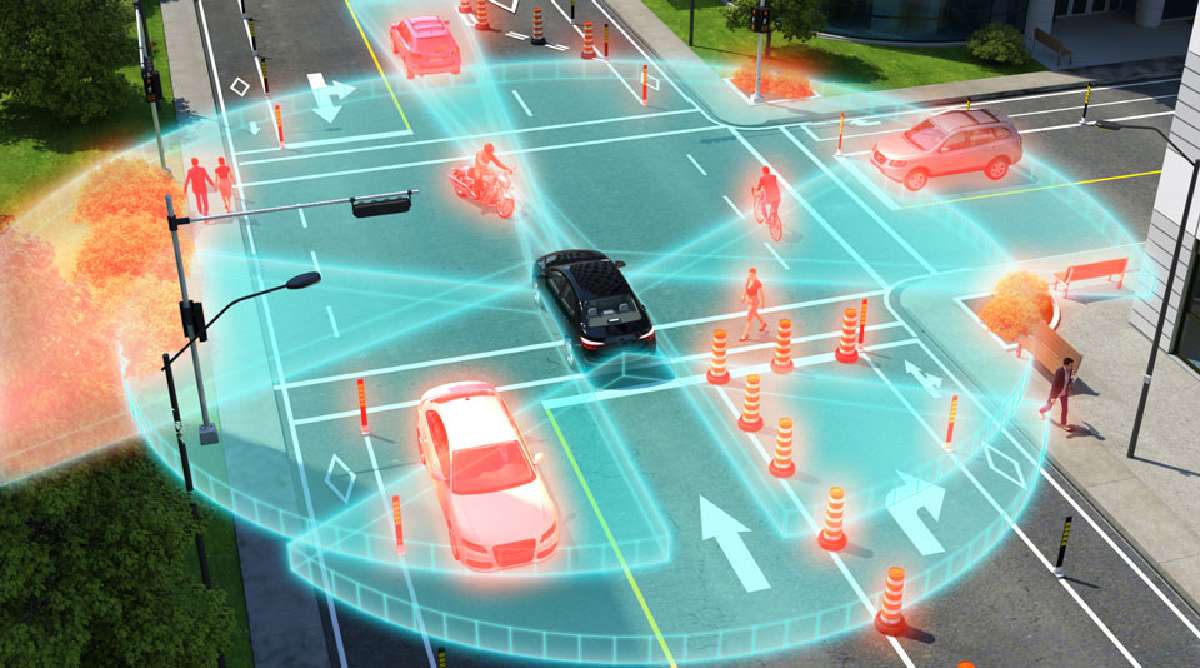
Programar el automóvil autónomo perfecto que siempre tomará la decisión más segura es una tarea enorme y técnica. A diferencia de otros vehículos autónomos, que generalmente se despliegan en entornos estrictamente controlados, los vehículos autónomos deben funcionar en la red de carreteras infinitamente impredecible, procesando rápidamente muchas variables complejas para permanecer seguros.

Inspirándonos en el código de circulación, estamos trabajando en un conjunto de reglas que ayudarán a los vehículos autónomos a tomar las decisiones más seguras en todos los escenarios imaginables. Verificar que estas reglas funcionen es el obstáculo final que debemos superar para conseguir vehículos autónomos confiables en nuestras carreteras.
Primera ley de Asimov
El autor de ciencia ficción Isaac Asimov escribió las "tres leyes de la robótica" en 1942. La primera y más importante ley dice: "Un robot no puede dañar a un ser humano o, por inacción, permitir que un ser humano sufra daño". Cuando los vehículos autónomos lesionan a los seres humanos, claramente violan esta primera ley.

En el National Robotarium (Un centro líder mundial en robótica e inteligencia artificial auspiciado por la Heriot Watt University y la University of Edinburgh) estamos liderando investigaciones destinadas a garantizar que los vehículos autónomos siempre tomen decisiones que cumplan con esta ley. Dicha garantía proporcionaría la solución a las graves preocupaciones de seguridad que impiden el despegue de los vehículos autónomos en todo el mundo.
El software de IA es bastante bueno para aprender sobre escenarios que nunca ha enfrentado. Mediante el uso de "redes neuronales" que se inspiran en el diseño del cerebro humano, dicho software puede detectar patrones en los datos, como los movimientos de automóviles y peatones, y luego recordar estos patrones en escenarios novedosos.

Pero aún tenemos que demostrar que las reglas de seguridad que se enseñen a los vehículos autónomos funcionarán en estos nuevos escenarios. Para ello, podemos recurrir a la verificación formal: el método que utilizan los científicos informáticos para demostrar que una regla funciona en todas las circunstancias.
En matemáticas, por ejemplo, las reglas pueden probar que x + y es igual ay + x sin probar todos los valores posibles de ‘x’ y de ‘y’. La verificación formal hace algo similar: nos permite probar cómo reaccionará el software de IA a diferentes escenarios sin que tengamos que probar exhaustivamente todos los escenarios que podrían ocurrir en la vía pública.

Uno de los éxitos recientes más notables en el campo es la verificación de un sistema de inteligencia artificial que utiliza redes neuronales para evitar colisiones entre aeronaves autónomas. Los investigadores han verificado formalmente con éxito que el sistema siempre responderá correctamente, independientemente de las maniobras horizontales y verticales de la aeronave involucrada.
Codificación de carreteras
Los conductores humanos siguen un código de circulación para mantener seguros a todos los usuarios de la carretera, que depende del cerebro humano para aprender estas reglas y aplicarlas con sensatez en innumerables escenarios del mundo real. También podemos enseñarles a los coches autónomos el código de circulación. Eso requiere que eliminemos cada regla en el código, enseñemos a las redes neuronales de los vehículos a comprender cómo obedecer cada regla y luego verifiquemos que se puede confiar en que obedecerán estas reglas de manera segura en todas las circunstancias.
Sin embargo, el desafío de verificar que estas reglas se seguirán de manera segura es complicado cuando se examinan las consecuencias de la frase "nunca se debe" en el código de carreteras. Para hacer que un automóvil autónomo sea tan reactivo como un conductor humano en cualquier escenario dado, debemos programar estas políticas de tal manera que tengan en cuenta los matices, el riesgo ponderado y el escenario ocasional en el que diferentes reglas están en conflicto directo, lo que requiere que el automóvil ignore uno o más de ellos.

Esta tarea no puede dejarse únicamente en manos de los programadores; requerirá la participación de abogados, expertos en seguridad, ingenieros de sistemas y legisladores. Dentro de nuestro proyecto AISEC recién formado, un equipo de investigadores está diseñando una herramienta para facilitar el tipo de colaboración interdisciplinaria necesaria para crear estándares éticos y legales para los vehículos autónomos.
Enseñar a los autos autónomos a ser perfectos será un proceso dinámico: que dependerá de cómo los expertos legales, culturales y tecnológicos definan la perfección a lo largo del tiempo. La herramienta AISEC se está construyendo con esto en mente, ofreciendo un "panel de control de misión" para monitorear, complementar y adaptar las reglas más exitosas que rigen los autos autónomos, que luego estarán disponibles para la industria.

Esperamos entregar el primer prototipo experimental de la herramienta AISEC para 2024. Pero aún necesitamos crear métodos de verificación adaptables para abordar los problemas de seguridad y protección restantes, y es probable que se necesiten años para construirlos e integrarlos en automóviles autónomos.
Los accidentes que involucran vehículos autónomos siempre generan titulares en los medios. Un automóvil autónomo que reconoce a un peatón y se detiene antes de chocarlo el 99% de las veces es motivo de celebración en los laboratorios de investigación, pero una máquina de matar en el mundo real. Al crear reglas de seguridad sólidas y verificables para los vehículos autónomos, estamos intentando hacer que ese 1% de los accidentes sean cosa del pasado.
Fuente: https://theconversation.com/perfecting-self-driving-cars-can-it-be-done-157483

